

摘要:本文探讨了马斯克的纯视觉方案与激光雷达方案,分析了两者在算力与门槛方面的挑战。纯视觉方案依赖强大的算法和算力支持,而激光雷达方案则面临技术门槛和成本问题。随着技术的发展和融合,纯视觉和激光雷达方案将逐渐融合,以实现更高效、更准确的自动驾驶技术。这一过程需要克服技术难题,降低门槛,并不断提升算力支持。
本文目录导读:
随着自动驾驶技术的飞速发展,各种技术路线纷纷涌现,马斯克的纯视觉方案与激光雷达方案引发了业界的广泛关注,这两种方案各有优劣,对于算力和门槛的要求也呈现出不同的特点,本文将深入探讨这两种方案的特点及其未来可能的融合趋势。
马斯克的纯视觉方案:算力要求高,门槛高
马斯克的纯视觉方案主要依赖于高性能的计算机视觉技术,通过对海量图像数据的处理和分析来实现自动驾驶,这一方案的核心在于利用深度学习算法对图像进行识别、定位、跟踪等操作,以实现车辆的自主导航。
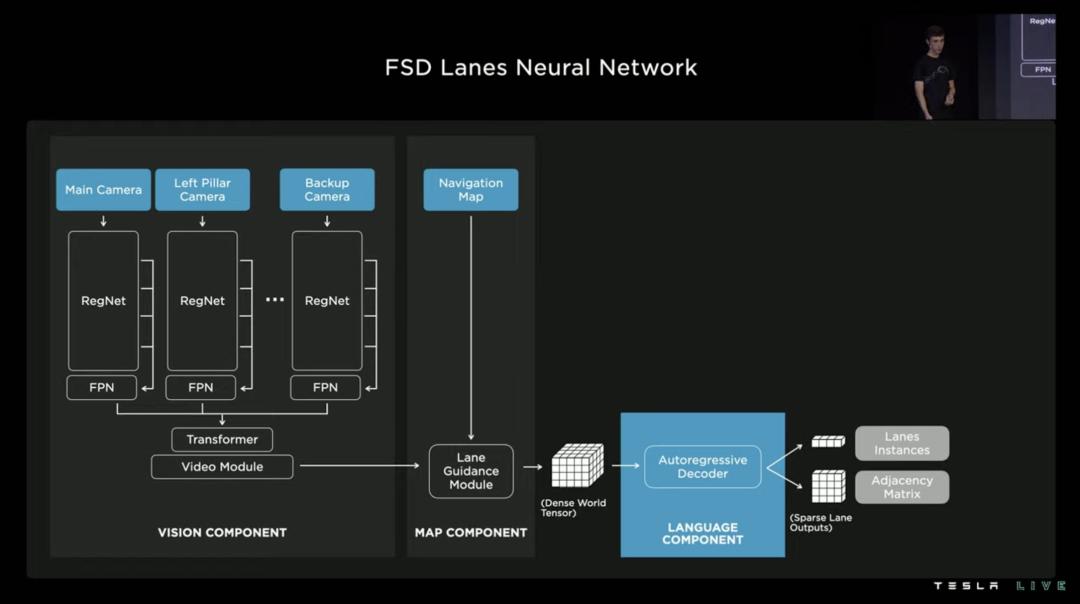
纯视觉方案对算力的要求极高,为了实现高精度的图像识别和复杂的场景解析,需要强大的计算力支持,开发过程中涉及的算法、模型、数据处理等技术难度较高,使得门槛相对较高。
激光雷达方案:暂时成本稍高,但门槛低
与纯视觉方案不同,激光雷达方案主要通过激光雷达(LiDAR)设备获取周围环境的信息,结合GPS、惯性测量单元(IMU)等数据,实现车辆的定位与导航,虽然激光雷达方案在成本上暂时稍高,但其技术门槛相对较低。
激光雷达方案的技术实现相对简单,不需要像纯视觉方案那样处理复杂的图像数据,对于开发者的技术要求相对较低,激光雷达方案也存在一定的局限性,如受天气、环境等因素影响较大。

未来的终极会否是合二为一?
面对纯视觉方案和激光雷达方案的挑战,未来的自动驾驶技术会走向何方?是否会出现二者的融合方案?这是业界关注的焦点。
从技术的发展趋势来看,纯视觉方案与激光雷达方案的融合是一种可能的发展趋势,二者各有优势:纯视觉方案具有高度的灵活性和适应性,能够识别复杂的场景和物体;而激光雷达方案则能提供精确的环境信息,受天气和环境因素的影响较小,通过二者的结合,可以取长补短,提高自动驾驶系统的性能和稳定性。
随着技术的不断进步,算力的提升和成本的降低也将为融合方案提供有力支持,纯视觉方案与激光雷达方案的融合可能将成为主流趋势,这种融合方案将结合两种技术的优点,提高自动驾驶系统的性能、稳定性和适应性,随着技术的进步和成本的降低,这种融合方案将更具竞争力。

马斯克的纯视觉方案与激光雷达方案各有优劣,对于算力和门槛的要求也呈现出不同的特点,面对未来的挑战,二者融合可能将成为一种趋势,这种融合方案将结合两种技术的优点,提高自动驾驶系统的性能、稳定性和适应性,推动自动驾驶技术的进一步发展,这需要我们继续深入研究、不断探索和创新实践。
 粤ICP备19126298号
粤ICP备19126298号